

第一条基于毫米波雷达实现精准感知隧道数字孪生安全管控系统正式上线
发布时间:2022-11-30 10:10:55
广西信都至梧州高速公路于2022年11月30日正式通车。信梧高速是自治区层面统筹推进建设的重大项目,主线全长74.89公里,概算投资总金额为105.86亿元,是广西“县县通高速”的“收官”工程之一。信梧高速将会借助现代化智慧高速建设理念打造中国第一条基于毫米波雷达实现精准感知隧道数字孪生安全管控系统。

信梧高速爽冲隧道
隧道精准感知是当下智慧交通发展建设的重点之一,现有解决思路主要有两种,一种是通过激光雷达进行全方位扫描并利用数据融合技术和三维数字孪生技术将隧道内车辆变化情况和隧道环境情况给再现出来,这种方案的优点是检测精度高,不容易受电磁环境干扰而产生大量的误报警;但其缺点同样也是非常明显,其中单公里投资造价成本非常高,由于隧道属于半封闭环境,粉尘、油烟较多,震动剧烈而导致后期维护量和维护成本同样也是很高。一旦发生重大交通事故产生的明火烟雾都将会给激光雷达造成致命打击,此外激光雷达自身的激光衰减也给其在使用寿命和性价比上埋上了阴影。
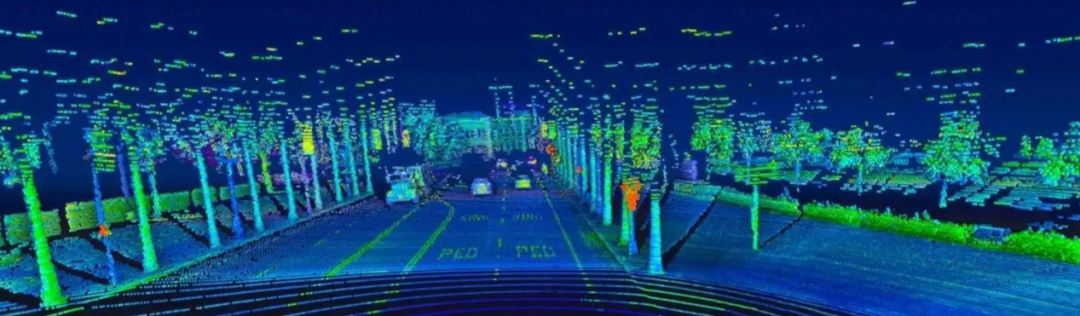
激光雷达扫描三维点云数据
另一种则是利用纯视频解析、AI分析检测技术来获取隧道内的实时车辆和隧道环境变化情况,再利用时空同步数据融合技术和三维数字孪生技术将其再现出来,这种技术优势就是投资成本低,但是由于前端数据来源为摄像机属于光学器件,因此,其自身所存在固有的缺陷都将无法避免如光照、烟雾、粉尘、震动;此外,基于视频融合技术对网络传输、时间同步、边缘计算服务器都有着非常高的要求,并对摄像机的安装角度布设位置提出了较高要求。基于以上两种方案实现的隧道精准感知数字孪生技术仍不能在隧道内发生重大交通事故时真正发挥其重要作用;因此,基于以上两种技术在智慧隧道精准感知安全管控方面只是做了项目示范,而没有进行大规模应用和推广。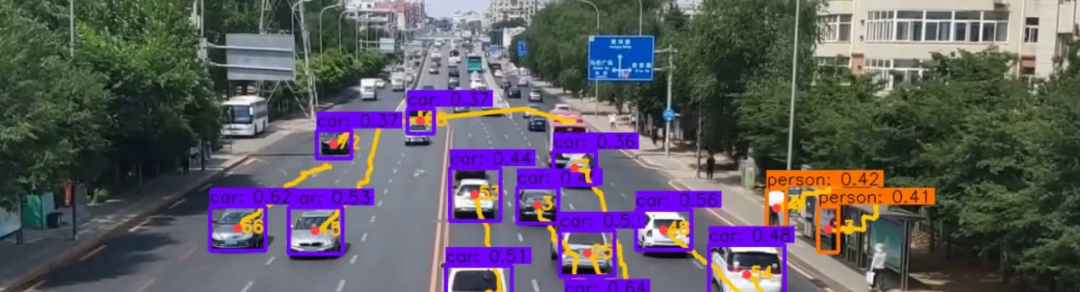
由广西北部湾投资集团直属企业广西新发展交通集团联合广西交通设计集团、广西交科集团共同打造的基于毫米波雷达实现精准感知隧道数字孪生安全管控系统被正式推上日程,众所周知毫米波雷达在封闭或半封闭的环境下,如:隧道内、室内等环境下雷达会产生大量杂波干扰并输出大量虚假目标和噪点,这主要是由于雷达在这种环境下会产生反射、漫反射、多次反射、折射、绕射、衍射等丰富的电磁传播方式使得在雷达接收端,大概率产生大量的虚假点云数据进而会产生虚假目标,而这些虚假目标又符合雷达跟踪检测规律,并且有的虚假目标和真实目标的运动状态和规律几乎保持一致,只是在位置和细节上略有不同,这些虚假目标对雷达性能产生巨大负面影响,大大降低了雷达采集数据准确性,极大地影响了整个系统的稳定性和可靠性。因此,如何抑制或减轻这些虚假点、提高雷达在隧道内更加稳定可靠的工作属于世界级难题,而这一技术难题一旦被真正突破,则智慧高速隧道精准感知安全管控这一全新技术,将会给中国智慧交通发展插上腾飞的翅膀,并具备划时代的意义。

由广西交科集团组织并邀请国内具有实力的研发机构、科研院校和技术前沿并具有成功应用案例的雷达设备制造商共同参与,并在广西信都至梧州高速公路爽冲隧道进行各类技术研究和测试工作。参与该项技术研究和设备测试的雷达厂家包括:河北德冠隆电子科技有限公司、北京理工睿行电子科技有限公司等公司,AI视频分析厂家包括:深圳市新创中天信息科技发展有限公司等公司共同参与,此次测试方式和方案为单一雷达感知实现车辆在隧道内连续跟踪定位、雷视组合感知方式实现车辆在隧道内连续跟踪定位、纯视频感知实现车辆在隧道内连续跟踪定位,测试场景包括高密度车辆队列行驶、高密度车辆并排行驶、车辆连续变道行驶、车辆超速行驶、车辆慢速行驶、车辆变道超车行驶、停车事件检测、逆行事件检测、行人事件检测、连续跟踪监视、车辆追踪定位等各种复杂场景,并且以上所有测试内容被测试车辆必须保持车道级精准定位,并会对各种技术方案自身所存在的技术弊端进行模拟演练,看看是否可以通过全新技术手段来做进一步提升和改进,以达到智慧隧道对精准感知的全面需求。

测试施工现场
爽冲隧道全长1228米,整体采用双向四车道设计,通行时速80km/h,本次测试中,德冠隆采用最新研发的隧道专用型超高分辨率多波束分时扫描毫米波雷达来参加此次测试,并将设备安装在爽冲隧道上行方向一侧,共计使用6台毫米波雷达设备来覆盖整条隧道。现场测试内容:
雷达性能测试
行人下车后行走、行人停留后行走 | |||
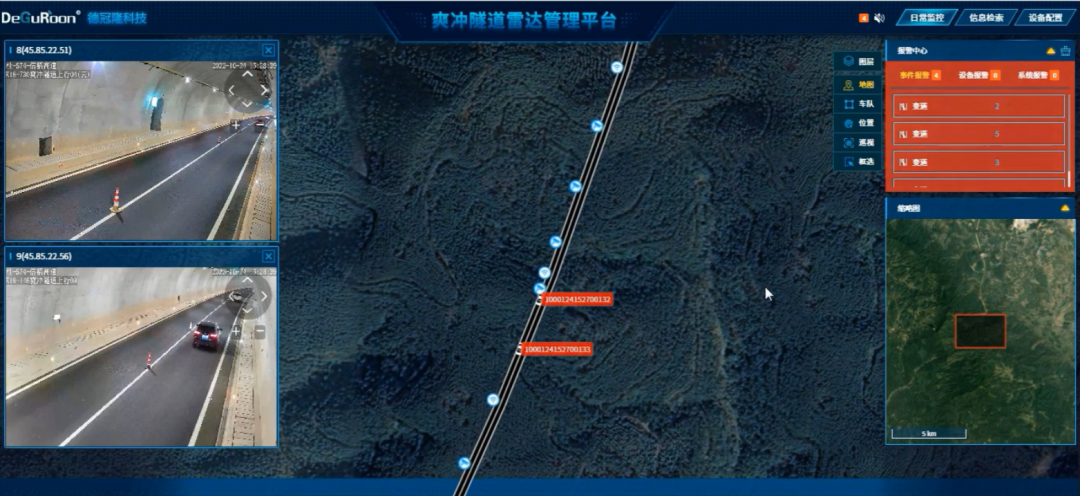
德冠隆二维数字孪生综合管理预警指挥系统
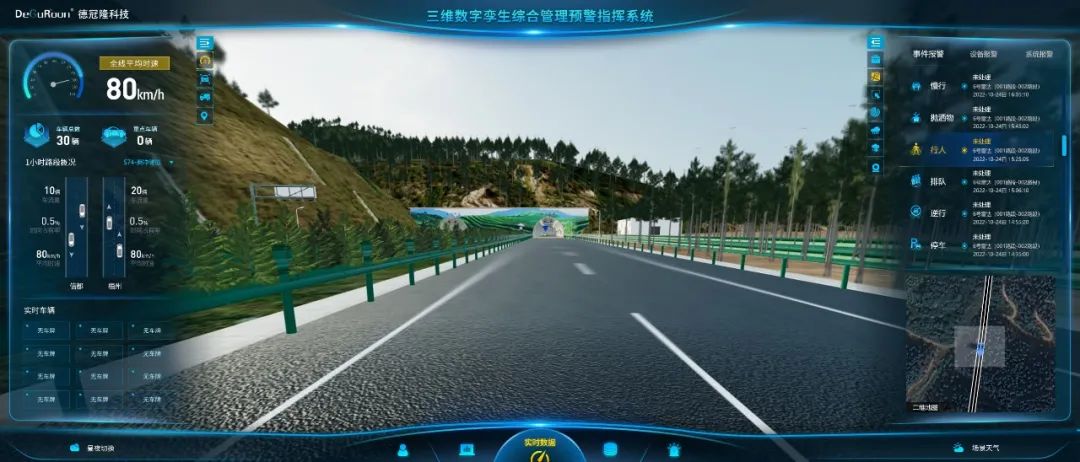
德冠隆三维数字孪生综合管理预警指挥系统
平台测试
路段:实现路段定位 雷达:实现雷达定位及详情展示。雷达详情中,左侧展示了雷达名称、编号、桩号、IP、端口及经纬度等信息,右侧视频框展示距离该雷达最近的监控摄像机。下方展示该雷达范围内的平均车速,车流量及车型分析等。 监控摄像机:定位并打开摄像机监控图像 | ||
本次测试过程中德冠隆科技为了体现其研发整体综合能力,特采用单雷达感知技术、多源数据融合技术、二维和三维数字孪生技术、高精地图自动绘制技术来进行整体实力展示,在隧道内这种半封闭式环境进行如此复杂功能和性能测试,这对每个雷达厂家的现有技术和研发能力都提出了绝对性的挑战。德冠隆科技在该测试项目上投入共计19人,其中硬件研发人员6人、算法研发人员4人、平台研发人员5人、售前工程师4人。通过长达两个月高密度测试,德冠隆所有参与人员经历了一个又一个不眠之夜,他们的信念就是要超越自己、超越行业竞争对手、让不可能变为可能、让可能变为优秀。就是这样的坚定地信念,在2个月后的整体展示验收阶段,德冠隆凭借着历经3年专门针对隧道环境而全新研发的超高分辨率多波束分时扫描毫米波雷达、第四代多源数据融合技术和全新一代数字孪生平台,最终赢得了客户芳心和满意。
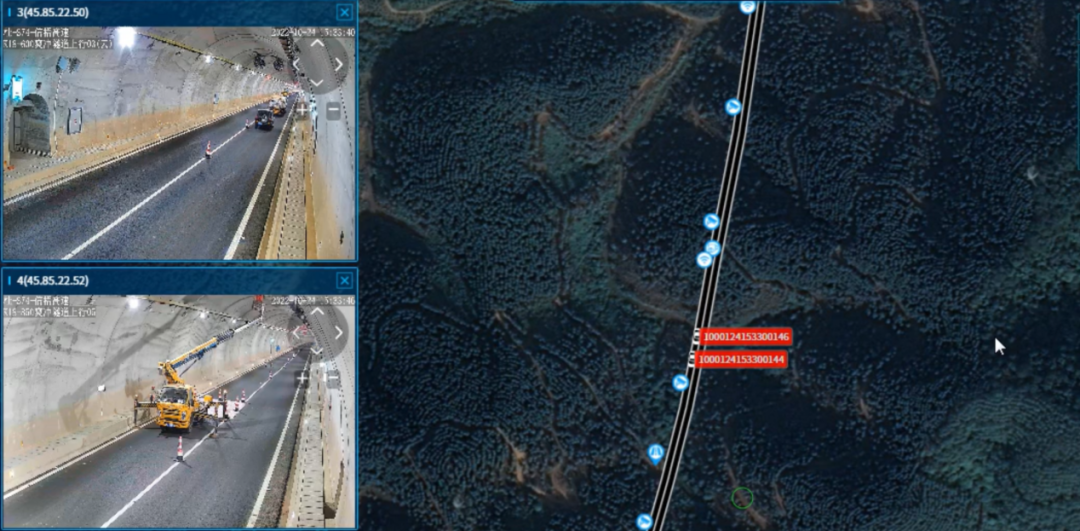
二维数字孪生系统车辆前后队列行驶跟踪监视测试
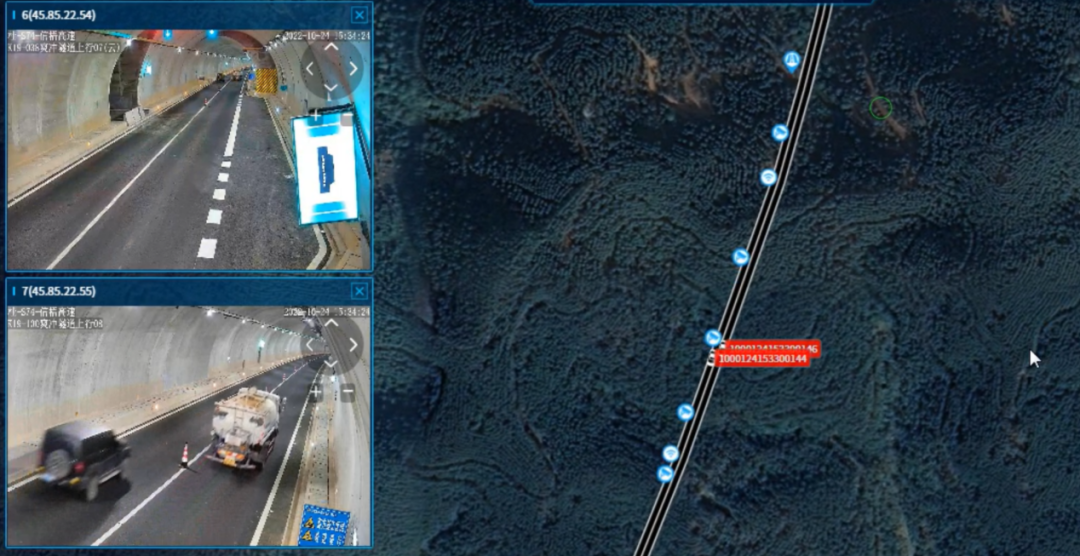
二维数字孪生系统车辆变道超车行驶跟踪监视测试
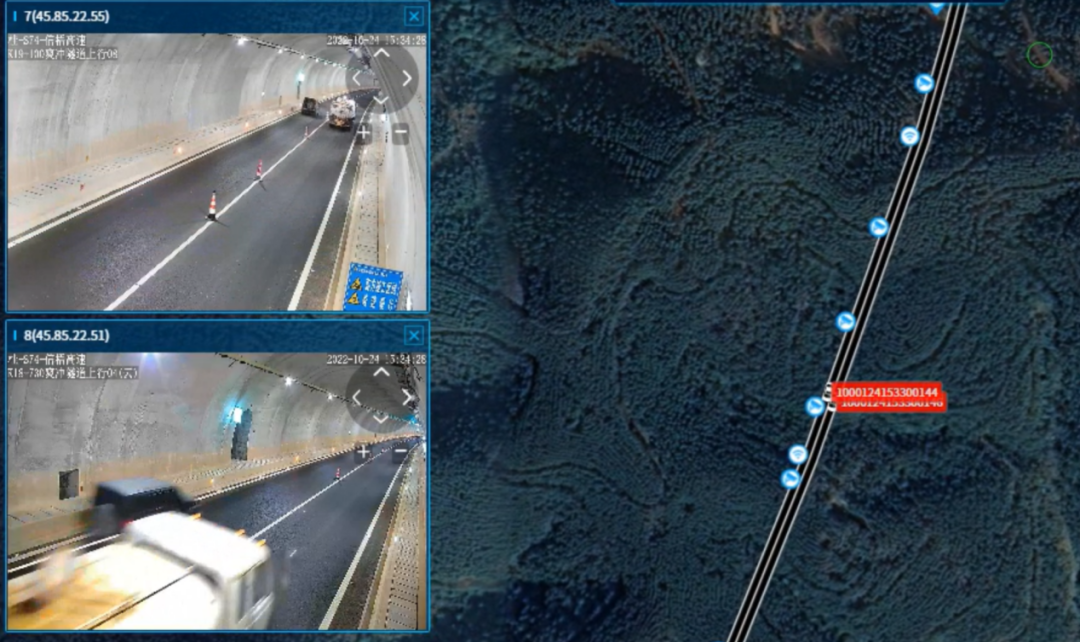
二维数字孪生系统车辆并排行驶跟踪监视测试

二维数字孪生系统行人入侵事件测试
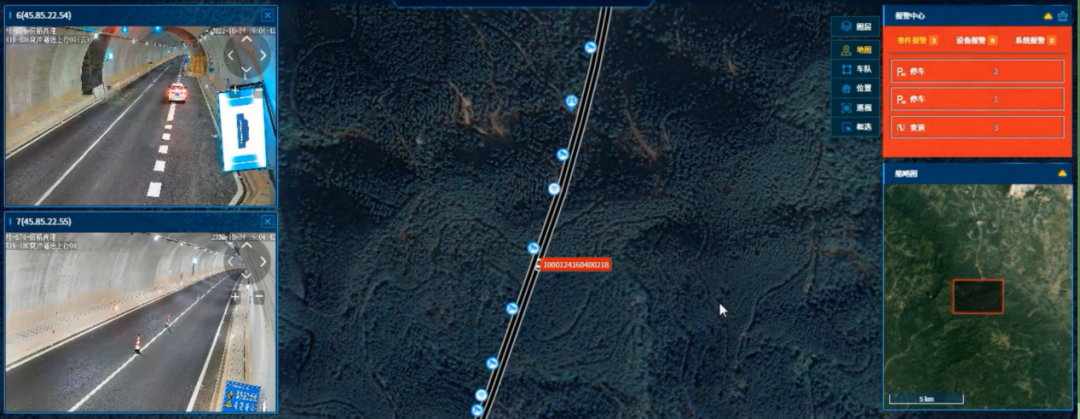
二维数字孪生系统车辆停驶事件测试
广西新发展交通集团、广西交通设计集团、广西交科集团数十位专家、博士团体都对德冠隆科技这套全新的基于毫米波雷达精准感知实现的隧道数字孪生安全管控系统给予了高度评价和认可。功夫不负有心人,这是对德冠隆所有科研人员最好的回馈。德冠隆将会继续秉承企业伟大愿景,为中国智慧交通快速发展,为人类安全出行作出自己的贡献。而此项技术被正式验证落地后,将会打破现有智慧隧道数字孪生技术难以推广的尴尬局面,过去基于传统的单AI视频分析、毫米波雷达加视频融合、激光雷达加视频融合技术而言,在技术和性能上都有了很大的提升。德冠隆科技利用具有数十项发明专利技术所打造的全新智慧隧道数字孪生技术相对于过去动不动就以百万元起步单公里造价成本,其制作成本有了大幅的下降,据初步统计可以达到每公里不到30万元,几乎接近传统机电系统单公里的投资成本造价。并且该技术保持了毫米波雷达独有的特性,即不受光线影响、不受灰尘影响,使得后期的维护量也大大地减少了很多。该技术的出现将会加速基于毫米波雷达实现精准感知隧道数字孪生安全管控系统在全国范围快速得到推广和应用,并为智慧隧道应用诉求的普及变成了可能。
二维数字孪生系统
三维数字孪生系统



